Algorithms and Devices for Distributed Tracking of Mobile Agents
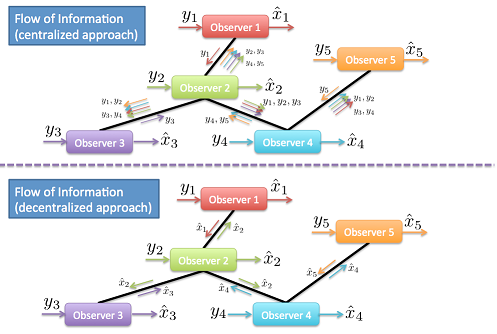
This work focuses on the design of algorithms to achieve omniscience of the dynamic variables of a group of mobile agents, subject to power and communication constraints. In collaboration with Greg Marshall from the National Geographic Society (Crittercam Group), we are developing a tracking platform that is fully programmable, supports wirelessly networked distributed algorithms, and features GPS, IMU and high definition camera recording capability. This work is sponsored by NSF and AFOSR.
Team Decision Theory
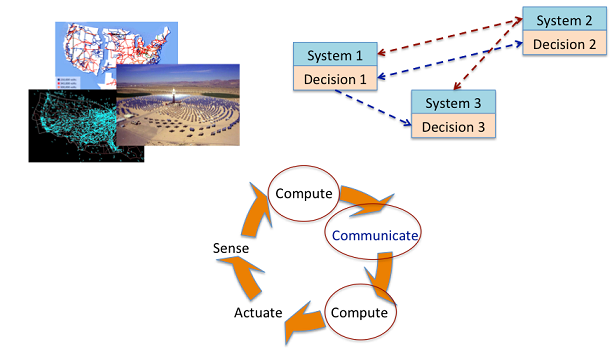
In collaboration with Serdar Yuksel (Queens U., Canada) and Aditya Mahajan (McGill U., Canada), we are investigating the structure and properties of optimal solutions to currently unsolved team decision problems. Some of our past work on optimal distributed estimation with communication costs, and optimal decentralized control subject to information constraints are also related to this topic. A tutorial on this topic was given at the 2012 IEEE Conference on Decision and Control, in collaborations with A. Mahajan, M. Rotkowitz and S. Yuksel. This work is supported by AFOSR and NSF.
Applications to Robotics and Autonomous Systems (Mixed Teams)
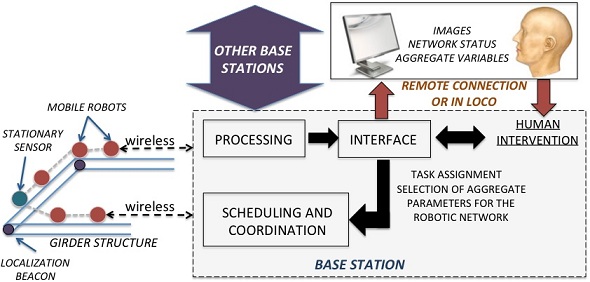
A related area of recent interest is the use of a formal team decision framework to investigate suitable information structures for mixed initiative team problems. This is specially relevant for networked robotic applications, where human and robots interact as a team. We have established a multidisciplinary discussion group on applications of these ideas for infrastructure safety inspection systems, with emphasis on bridges.
Optimal Control and Path Planning Subject to Secrecy Constraints
We are investigating optimal strategies to control teams of mobile assets subject to communication, energy and secrecy constraints. We have preliminary results for the single agent case and various secrecy metrics. This work is in collaboration with Dr. Ananthram Swami (ARL), and is being supported by AFOSR, ONR (past preliminary results) and ARL.
* We may provide drafts of unpublished work on these topics upon request