News Story
Workshop on Geometry of Collective Behavior organized by P. S. Krishnaprasad
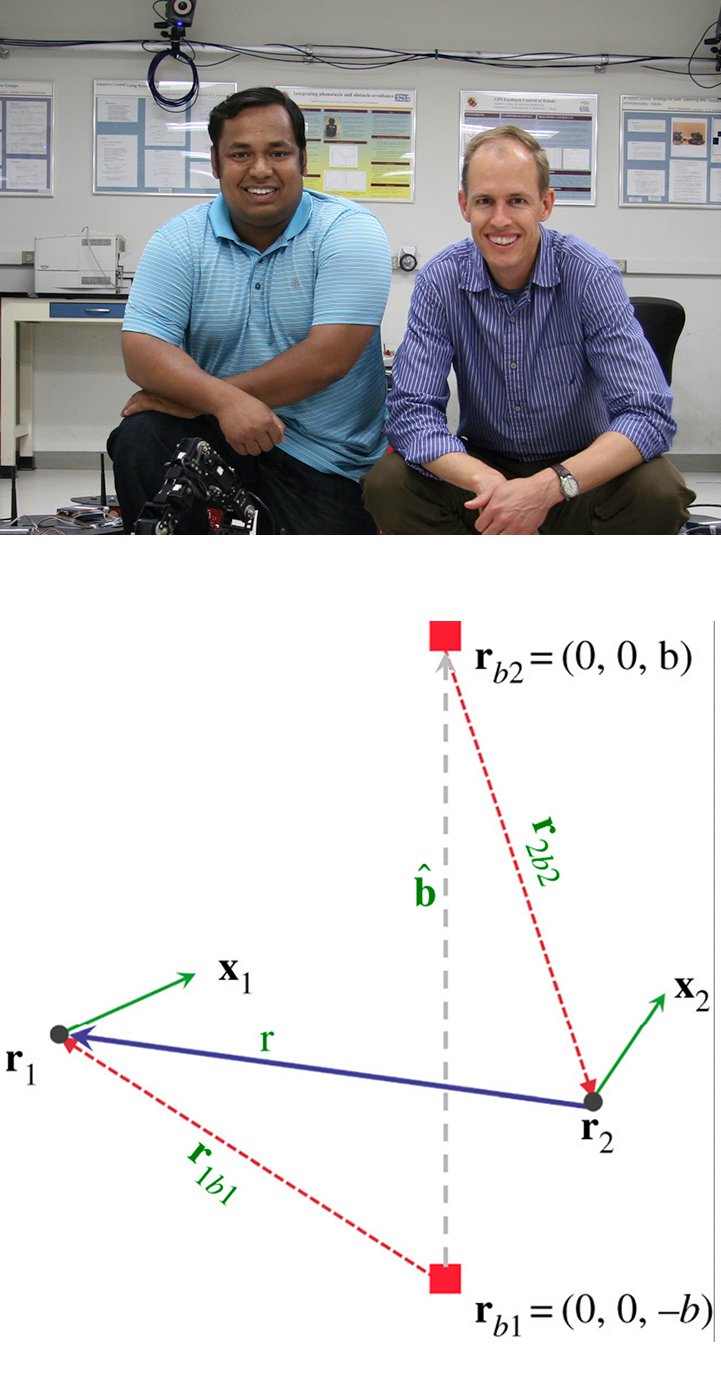
Professor P. S. Krishnaprasad (ECE/ISR) was the organizer of a full-day >Workshop on Geometry of Collective Behavior: Control, Dynamics and Reconstruction at the 53rd IEEE Conference on Decision and Control in Los Angeles. The conference was hosted by the IEEE Control Systems Society (CSS) in cooperation with the Society for Industrial and Applied Mathematics (SIAM), the Institute for Operations Research and the Management Sciences (INFORMS), the Japanese Society for Instrument and Control Engineers (SICE), and the European Control Association (EUCA).The workshop was held on Sunday, Dec. 14. It provided a self-contained and structured perspective of advances in the study of collective dynamic behavior in nature (bird flocks, fish schools) and technology (such as autonomous air-land-sea vehicles). The workshop introduced participants to a class of models and interaction strategies, associated control laws, and principles and algorithms for the discovery and synthesis of control laws that achieve collective behavior with a purpose. In addition to the stated examples, the study of collective behavior has a distinguished role in the foundations of physical science, as in work on the problem of stability of the solar system (by Lagrange, Laplace and their illustrious descendants), and James Clerk Maxwell’s investigation of the character and stability of Saturn’s rings (1859). Technical linkages to this scientific heritage were pointed out.
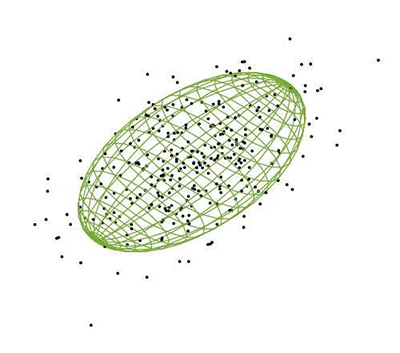
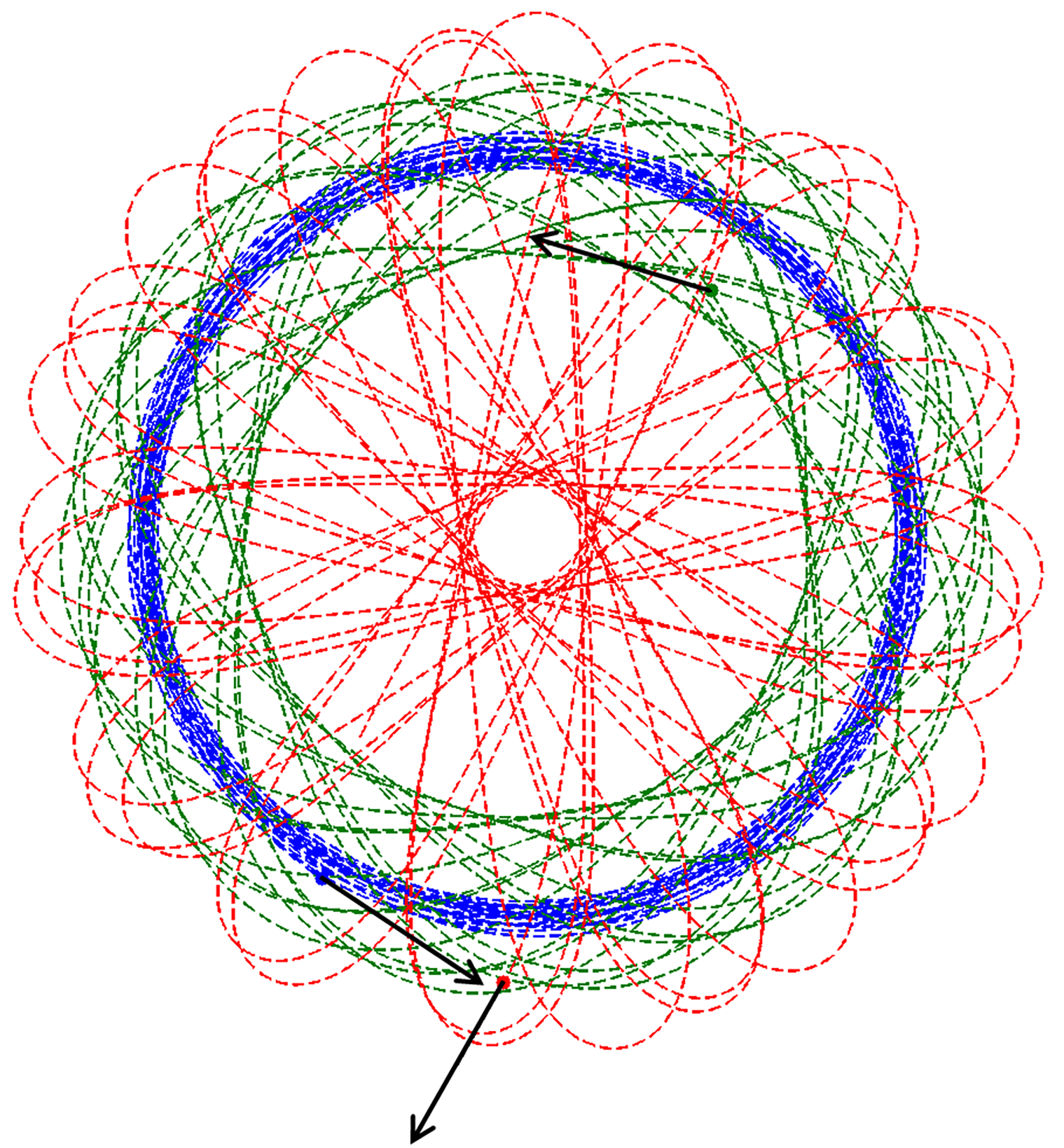
Geometric ideas will occupy a central place in the conceptual framework of the presentations. Geometry enters the investigation of collective behavior from multiple vantage points: the structure of configuration space; the synthesis of control strategies; the role of symmetries and reduction in closed loop dynamics; the analysis of empirical data from biology; and the realization of control strategies in autonomous systems. The workshop presented an exposition of developments in these directions, including some low dimensional examples. It also examined methods to assimilate sampled observations of collectives of continuous time dynamical systems, e.g. predator-prey encounters and bird (starlings) flocking events, into generative models with continuous time inputs and outputs. Results of such assimilation (reconstruction) were used to evaluate hypotheses of interest, based on correlations, delays, and possible mechanisms of interaction between elementary units of the observed population. Models were discussed via moving frames and methods from nonlinear smoothing, to solve the problem of numerically reconstructing collectives. Optimal control methods for computational schemes, and questions of integrability of extremals also were discussed.
The lectures relied on basic tools from the theory of Lie groups and Lie algebras, and differential geometry. These tools were presented in an accessible and just-in-time manner. Software tools developed by the lecturers were demonstrated on real datasets (from biology to underwater robotics). Laboratory implementations of control laws on robotic platforms (in a testbed at the University of Maryland) provided illustrations of the strengths and broad applicability of the theoretical framework of the workshop.
Published December 12, 2014
Related Stories
Stories / November 30, 2023
Workshop honors alum Naomi Leonard

Stories / March 8, 2023
The Falcon and the Flock

Stories / July 7, 2022
Alum Naomi Leonard is 2023 IEEE Control Systems Award recipient

Stories / May 6, 2020
Alumnus Kevin Galloway earns tenure at the U.S. Naval Academy

Stories / May 6, 2020
ISR/ECE alumni collaborate on control paper published in PRS-A
Stories / April 26, 2017
Flocks and Form
Stories / November 9, 2016
Small collectives and nonlinear dynamics
Stories / April 2, 2015
Optimal control and strong interactions imply flock cohesion

Stories / August 17, 2013
Galloway, Justh, Krishnaprasad publish chasing and flocking...

Stories / July 2, 2012
Krishnaprasad awarded AFOSR DURIP for collective behavior...