News Story
ISR/ECE alumni collaborate on control paper published in PRS-A
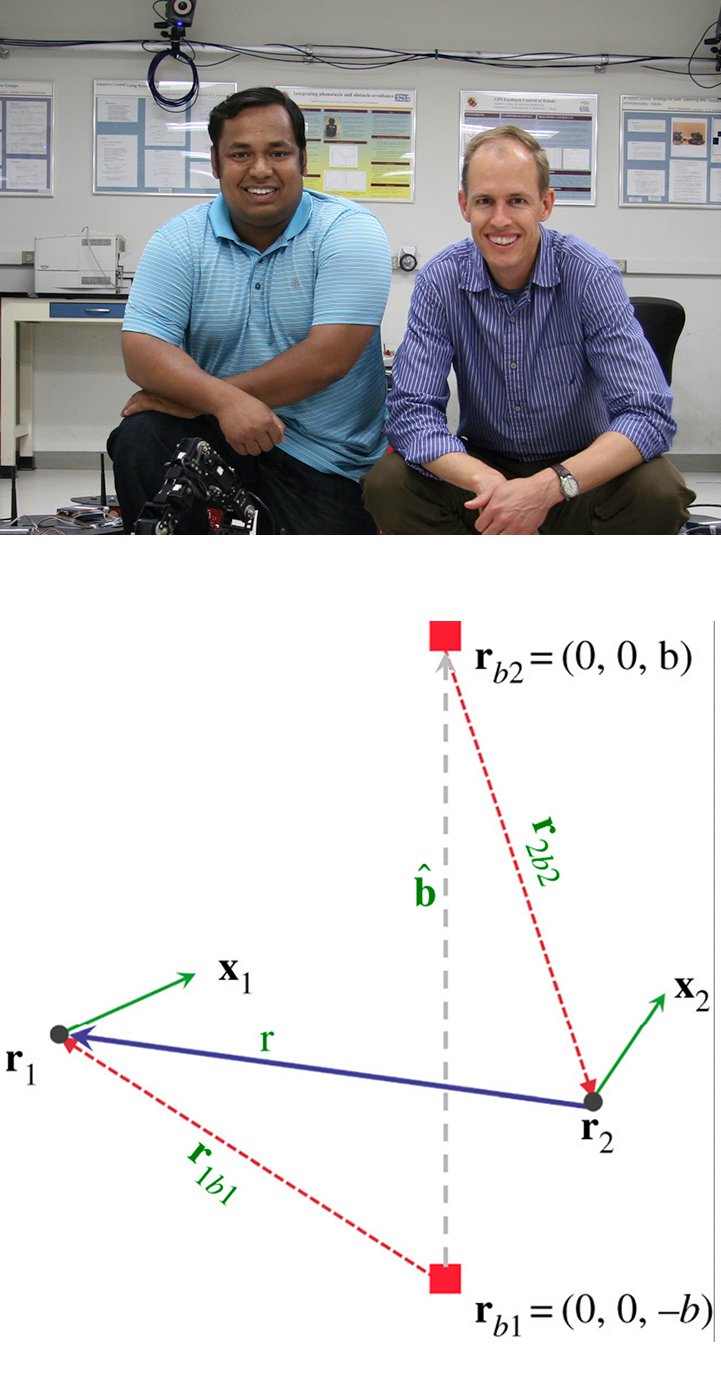
Above: Biswadip Dey and Kevin Galloway in the Intelligent Servosystems Laboratory. Below: Two mobile agents r1 and r2 maneuvering in the vicinity of fixed beacons rb1 and rb2. (Fig. 1 from the paper.)
Two ISR/ECE alumni have collaborated on a paper newly published in Proceedings of the Royal Society A. Kevin Galloway (EE Ph.D. 2011) and Biswadip Dey (EE Ph.D. 2015) co-wrote the paper, "Beacon-referenced pursuit for collective motion in three dimensions," published on Feb. 12, 2020. They introduce a decentralized control mechanism to guide steering control of autonomous agents maneuvering among multiple moving and stationary entities in a three-dimensional environment.
Galloway is an associate professor at the United States Naval Academy, where he is on the faculty of the Department of Electrical and Computer Engineering. Dey is a research scientist at Siemens in Princeton, N.J. Both alumni were advised by Professor P. S. Krishnaprasad (ECE/ISR) and conducted research in the Intelligent Servosystems Laboratory.
Their control law is a modification of the three-dimensional constant bearing (CB) pursuit law that provides a way to allocate simultaneous attention to multiple entities. Galloway and Dey investigate the behavior of the closed-loop dynamics for a system with one agent referencing two beacons, as well as a two-agent mutual pursuit system wherein each agent employs the beacon-referenced CB pursuit law with regards to the other agent and a stationary beacon. They demonstrate that under certain assumptions on the associated control parameters this problem admits circling equilibria with agents moving on circular orbits with a common radius, in planes perpendicular to a common axis passing through the beacons. As the common radius and distances from the beacon are determined by the choice of parameters in the pursuit law, their approach provides a means to engineer desired formations in a three-dimensional setting.
Published May 6, 2020
Related Stories
Stories / November 30, 2023
Workshop honors alum Naomi Leonard

Stories / July 7, 2022
Alum Naomi Leonard is 2023 IEEE Control Systems Award recipient

Stories / May 6, 2020
Alumnus Kevin Galloway earns tenure at the U.S. Naval Academy

Stories / November 29, 2023
Alum Fumin Zhang elected to IEEE Fellow
Stories / July 3, 2023
ECE and ISR alumni feature prominently at American Control...
Stories / June 19, 2023
Alum Sean Andersson named Mechanical Engineering Department...
Stories / March 8, 2023
The Falcon and the Flock

Stories / February 20, 2023
Alumnus Udit Halder’s work published as cover article in...
Stories / August 10, 2020
Alum Xiaobo Tan named to Richard M. Hong Endowed Chair at MSU
Stories / June 18, 2020
Alum Dipankar Maity joins ECE faculty at University of North...
